
Drone Fleet
Python, OpenCV, TensorFlow, TelloSDK
Summer 2020 - Present
The Drone Fleet is a long-term project. The ultimate goal is to practice programming devices. I envision three phases: Premade, Build, and Connect.
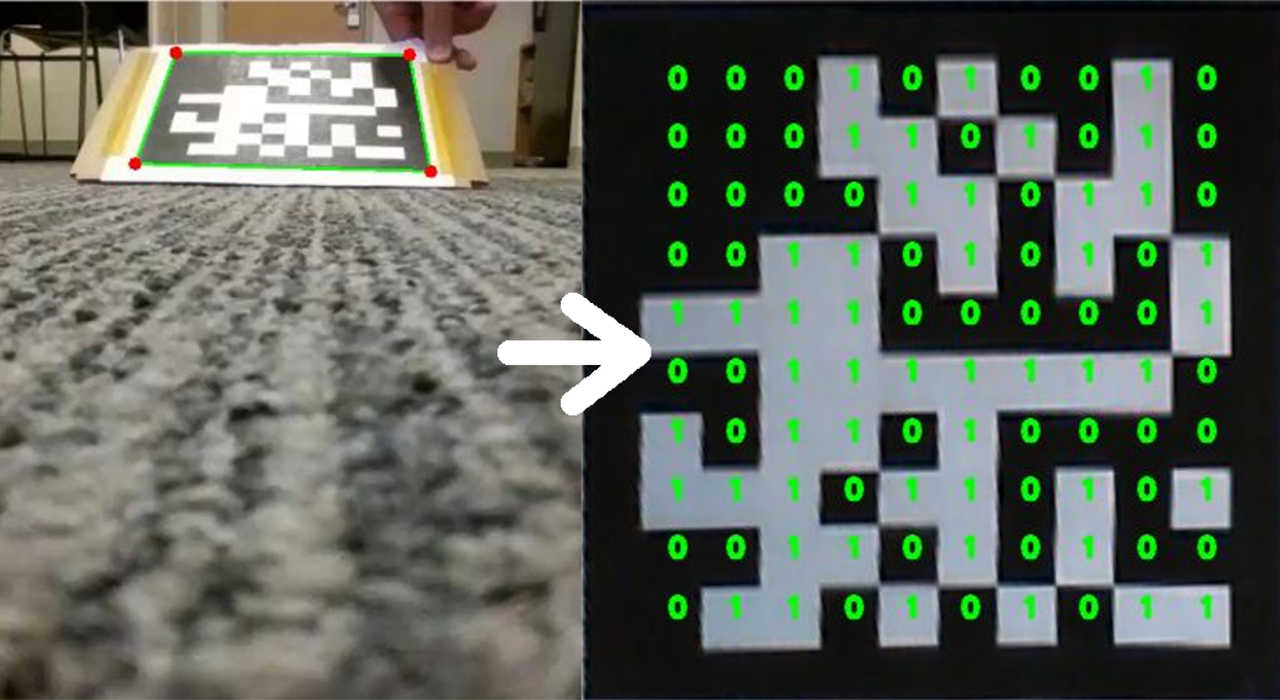
I am currently in the Premade phase, learning and coding premade drones called Tello EDUs sold by DJI, a technology company that sells "aerial photography systems." I will utilize the swarm functionality and programmability to create a fleet that can individually perform actions, e.g., follow, elevate, etc., based on the body gestures of a designated commander through computer vision using OpenCV and TensorFlow, coded in Python.
In the Build phase, I will attempt to construct, program, and fly my own drones. I will use electronics like gyroscopes and accelerometers, and implement PIDs in order to have steady and reliable flight.
In the Connect phase, I will apply my computer vision algorithms from the Premade phase to my personally built drones, expanding on the code for any potentially new hardware components, e.g., additional sensors.